
行星减速机与伺服电机是工业领域中常用的两种设备,它们在结构、工作原理、应用场景及控制方式等方面存在诸多区别。具体如下:
结构组成
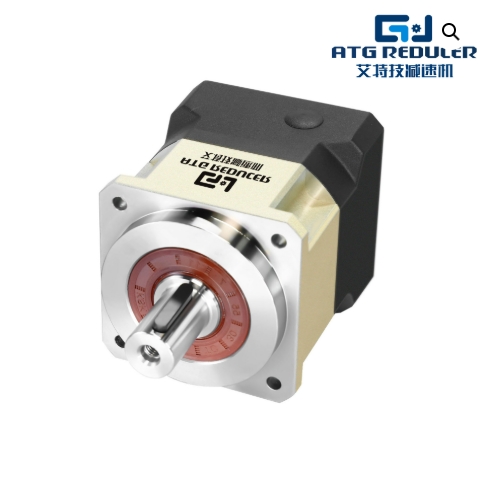
行星减速机:主要由行星齿轮副、太阳轮、外齿轮等组成。行星齿轮副围绕太阳轮旋转,同时与外齿轮啮合,通过这种结构实现动力的传递和减速功能。
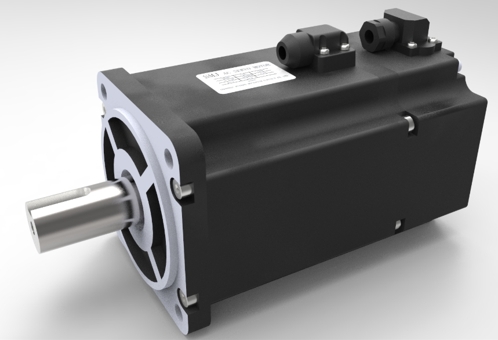
伺服电机:由电机本体、编码器、控制器等组成。电机本体是产生动力的部分,编码器用于实时反馈电机的运动状态,如位置、速度等信息,控制器则根据接收到的信号对电机进行精确控制。
工作原理
行星减速机:利用行星齿轮传动的原理,通过改变齿轮的齿数和传动比,将输入轴的高速旋转转换为输出轴的低速旋转,同时提高输出扭矩。例如,一个行星减速机的减速比为 10,输入轴转速为 1000 转 / 分钟,则输出轴转速为 100 转 / 分钟,而输出扭矩则会相应增大。
伺服电机:通过接收控制器发出的控制信号,如脉冲信号或模拟信号,来精确控制电机的转速、位置和扭矩。伺服电机内部的编码器会实时反馈电机的实际运动状态给控制器,控制器根据反馈信号与目标信号的差异进行调整,从而实现精确的运动控制。例如,在数控机床中,伺服电机根据编程指令精确控制刀具的位置和运动速度,以保证加工精度。
应用场景
行星减速机:广泛应用于各种需要减速和增加扭矩的场合,如工业机械设备、自动化生产线、机器人关节、电梯、印刷机、包装机等。在这些应用中,行星减速机通常与普通电机配合使用,以满足设备对低速、高扭矩的要求。
伺服电机:主要应用于对运动控制精度要求较高的场合,如数控机床、机器人技术、自动化生产线、电子制造设备、医疗器械、航空航天等领域。在这些应用中,伺服电机能够快速响应控制信号,实现高精度的位置定位和速度控制。
控制方式
行星减速机:通常由普通电机驱动,其控制方式相对简单,一般通过改变电机的转速来间接控制减速机的输出转速。例如,可以通过变频器调节电机的频率来改变电机的转速,从而实现对行星减速机输出转速的控制。
伺服电机:需要配备专门的伺服控制器,通过控制器与电机之间的闭环反馈控制来实现精确的转速和位置控制。伺服控制器可以根据用户设定的目标位置、速度和加速度等参数,实时计算出电机需要输出的扭矩和转速,并通过控制信号驱动伺服电机运动。同时,编码器会将电机的实际运动状态反馈给控制器,控制器根据反馈信号进行调整,以保证电机的运动精度。
仟德亿传动科技(苏州)有限公司是集研发·制造销售·服务于一体的国家高新技术企业。公司立足于智能化、自动化装备核心零部件设计和制造,为客户提供智能驱动解决方案。积极开拓国内外市场,足迹遍布全球30余国。我们产品主要包括ATG高精密行星减速机、RV关节减速机、谐波减速机,中空旋转平台,换向器,转角器,分割器等传动机械产品。
