
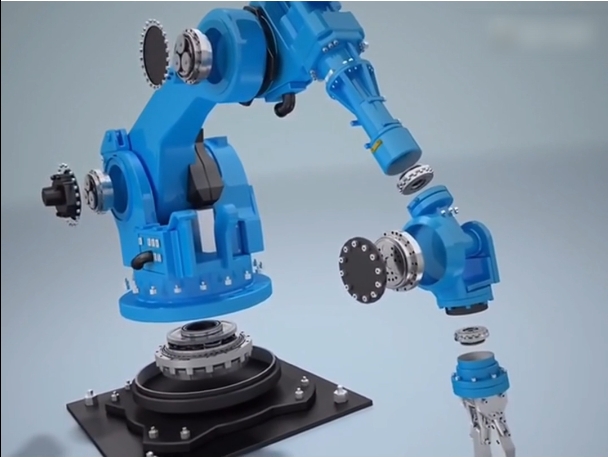
精确控制
工业机器人需要精确地控制末端执行器的位置和姿态,以完成各种高精度的任务,如焊接、装配、喷涂等。减速机可以将电机的高转速降低到机器人各关节所需的低转速,同时提高扭矩,从而实现更精确的位置控制。通过减速机的减速比转换,电机的微小转动可以转化为机器人关节的精确微小运动,确保机器人能够准确地定位和操作。

提高扭矩
机器人的关节在运动时需要克服各种阻力,包括负载的重力、摩擦力以及惯性力等。减速机能够在降低转速的同时,根据其减速比成比例地放大电机输出的扭矩,使机器人的关节能够产生足够的力量来驱动负载运动。这样,即使是较小功率的电机,搭配合适的减速机后,也能够满足机器人在不同工作场景下对扭矩的要求。
增强稳定性
减速机具有较高的刚性和传动精度,能够减少机器人运动过程中的振动和冲击。在机器人快速启停、加速或减速时,减速机可以平滑地传递动力,避免因电机直接驱动而产生的速度波动和不稳定现象,从而提高机器人的运动稳定性和可靠性,保证机器人在长时间运行过程中能够保持良好的工作状态。
优化电机选型
由于减速机能够实现转速降低和扭矩放大的功能,这使得在机器人设计中可以选择转速较高、体积较小、重量较轻的电机。如果不使用减速机,为了满足机器人关节对扭矩和转速的要求,就需要选用大功率、大体积的电机,这不仅会增加机器人的成本和重量,还会对机器人的结构设计和能源供应带来更大的挑战。
